新基建”按下快进键,智能机器人产业持续发力
新基建”按下快进键,智能机器人产业持续发力



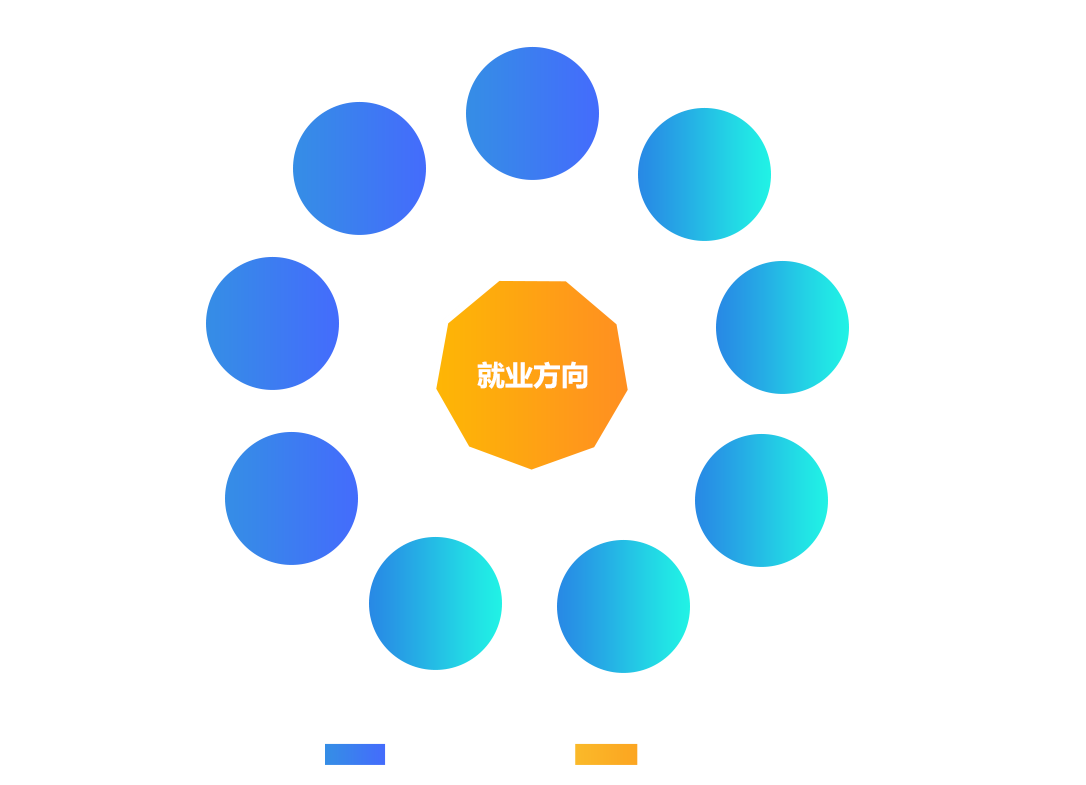
智能机器人产业发展迅猛,已引起世界各国的高度重视,到2025年,
新一代信息技术产业领域
人才缺口将超过900万人
-

自动驾驶 - 旁车检测与方向矫正
-
武汉火神山医院送餐机器
-

智慧物流 - 无人分拣
-

机器人点胶、焊接、抛光、
喷漆、元器件检测等 -

公园无人驾驶自动售货机
-

智慧商场 - 体温检测及客户分析

 教学案例以机器人开发应用为载体
教学案例以机器人开发应用为载体