无处不在的AI嵌入式+机器人开发技术应用
52个行业大类 、143个行业中类,都离不开软硬件能力兼备的人才
学完可以做什么?


《国家集成电路产业发展推进纲要》
《智能硬件产业创新发展专项行动》
《中国制造2025》
预计全行业人才需求将达76.65万
多地出台住房补助、创业补贴、
现金奖励、人才落户等人才引进政策
2022年行业市场规模12036亿元
2023年市场规模将达13093亿元
未来就业前景非常广阔
从硬件+软件到智能化
积累的经验越丰富
就业就越抢手
《中国集成电路产业人才发展报告》 / 中国半导体行业协会、中商产业研究院

52个行业大类 、143个行业中类,都离不开软硬件能力兼备的人才
学完可以做什么?
 观看答辩视频
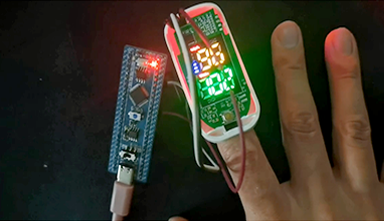
观看答辩视频简介基于stc8实现的血氧检测仪,使用段位数码管,能实时测量血液的氧饱和度和脉搏率。
 观看答辩视频
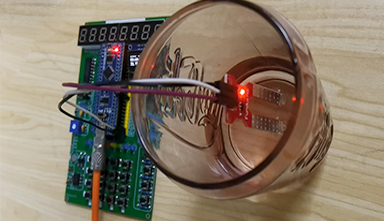
观看答辩视频简介基于stc8实现的水位水质检测设备,用于准确测量水位信息。
 观看答辩视频
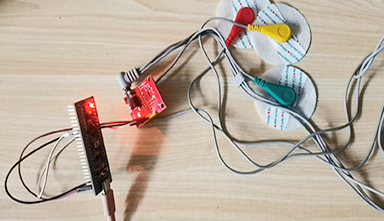
观看答辩视频简介基于stc8实现的心电监测仪,用于实时记录和分析人体心脏的电生理活动。
 观看答辩视频
观看答辩视频简介基于stc单片机开发的燃气泄露检测设备。
 观看答辩视频
观看答辩视频简介基于gd32实现的四旋翼飞行器。
 观看答辩视频
观看答辩视频简介基于STC8实现按键打地鼠功能、可显示计分、倒计时、调节难度、声音控制以及计分等功能。
 观看答辩视频
观看答辩视频简介基于STC8H8K64U单片机的多功能键盘,根据场景或者功能需求个性化定制数字键、功能键、方向键、确认键等多个按键。
 观看答辩视频
观看答辩视频简介本系统由单片机系统STC8H,外接矩阵键盘,LCD液晶显示数码管系统组成。系统实现了双模式切换,分别是密码和指纹模式,具备屏幕状态显示功能。
简介本系统由单片机系统STC8H,外接矩阵键盘,LCD液晶显示数码管系统组成。系统实现了双模式切换,分别是密码和指纹模式,具备屏幕状态显示功能。
亮点超出指定次数会报警、锁定,另外还有管理员模式可对密码和指纹进行管理。断电保护功能,断电后数据自动恢复,不会丢失。
观看答辩视频 观看答辩视频
观看答辩视频简介一款基于STC8H系列单片机的智能电动牙刷,具备智能模式调节、刷牙计时体型,OLED实时显示等功能。
 观看答辩视频
观看答辩视频简介基于STC8H8K64U的脸盆涡轮洗衣机,实现了多模式切换,具备洗衣、漂洗、甩干等功能,结合蜂鸣器以及显示屏,对过程和结果进行提示和预警。
简介基于STC8H8K64U的脸盆涡轮洗衣机,实现了多模式切换,具备洗衣、漂洗、甩干等功能,结合蜂鸣器以及显示屏,对过程和结果进行提示和预警。
亮点实现了多模式电机驱动开发,正反转、转速以及时间控制等。
观看答辩视频 观看答辩视频
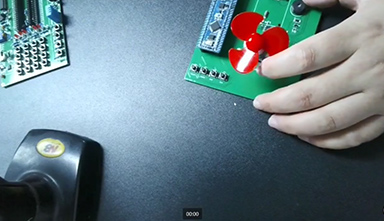
观看答辩视频简介可通过蓝牙动态调整发热效率,使用ADC通过NTC热敏电阻实现实时温度监测,同时通过驱动风扇扩散温度覆盖范围。
 观看答辩视频
观看答辩视频简介采用2.4寸SPI-TFT屏和I2C EEPROM,搭载GD32F470芯片结合ADC摇杆及按键实现的一款手持Mini游戏机。
简介采用2.4寸SPI-TFT屏和I2C EEPROM,搭载GD32F470芯片结合ADC摇杆及按键实现的一款手持Mini游戏机。
亮点支持多款游戏,包含贪吃蛇、小恐龙、炸弹人、俄罗斯方块和Flappy bird等
观看答辩视频 观看答辩视频
观看答辩视频简介使用QMI8685A高性能陀螺仪,结合压力传感、运算放大器等器件数据融合完成对游戏的控制,可以基于此产品继续拓展智能手表等功能。
简介使用QMI8685A高性能陀螺仪,结合压力传感、运算放大器等器件数据融合完成对游戏的控制,可以基于此产品继续拓展智能手表等功能。
亮点不需要按钮即可操作,依托国产高性能传感器,通过传感器来控制游戏运行,同类项目有智能手表、智能闹钟、指南针、手柄等;
观看答辩视频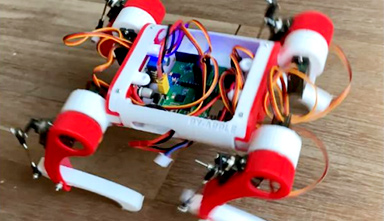 观看答辩视频
观看答辩视频简介基于传智教育Hi3861模组8自由度四足平台,板载了陀螺仪、加速度计以及一枚成本仅5元可运行TinyML的芯片RP2040,通过16路PWM舵机控制四条腿,实现了狗的步态分析与运动学反解等。
简介基于传智教育Hi3861模组8自由度四足平台,板载了陀螺仪、加速度计以及一枚成本仅5元可运行TinyML的芯片RP2040,通过16路PWM舵机控制四条腿,实现了狗的步态分析与运动学反解等。
亮点可以模拟狗的各种运动行为,行走、转弯、跳跃等;
观看答辩视频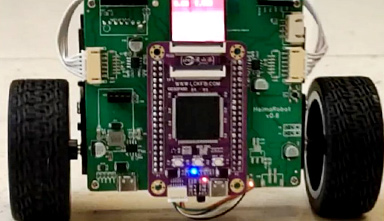 了解项目详情
了解项目详情简介基于GD32主控芯片,调度多MCU之间的协作,通过陀螺仪、编码器以及电机驱动等模块结合PID算法,完成小车稳定状态的评估与控制。
简介基于GD32主控芯片,调度多MCU之间的协作,通过陀螺仪、编码器以及电机驱动等模块结合PID算法,完成小车稳定状态的评估与控制。
亮点非常典型的控制系统案例,通过次案例可以掌握反馈控制和系统稳定控制的算法,通过精确的控制力对抗重力,使小车能够在一个不稳定的平衡点上保持平衡。
了解项目详情 了解项目详情
了解项目详情简介基于RISC-V架构的wifi小电视,由海思hi3861芯片、TFTLCD屏、wifi天线、分光棱镜、mpu6050陀螺仪和无源蜂鸣器等模块构成。
简介基于RISC-V架构的wifi小电视,由海思hi3861芯片、TFTLCD屏、wifi天线、分光棱镜、mpu6050陀螺仪和无源蜂鸣器等模块构成。
亮点搭载鸿蒙操作系统,支持wifi联网获取并展示天气信息,支持NFC和碰一碰拉起等功能。
了解项目详情就业友好,适合长线发展
没有满意的软硬件产品?
自己创造!
拥有软或硬件背景
自己动手做CPU
写操作系统

设计整个集成电路系统的硬件和嵌入式软件部分
拥有设计电子产品的能力,结构功能
可以自由裁剪,灵活定制
通信、汽车、医疗、工业、消费电子、安防、
智能家居、医疗器械等
需要掌握电路设计、物理设计、验证、制造流程、
嵌入式软件开发、操作系统移植等多个领域的知识,
市场急缺、人才需求量大,未来发展空间广阔
只涉及嵌入式软件部分,对硬件不太了解
受限于硬件方案,只能基于现成的开发板开发,
对原理图和硬件不熟悉
安防、智能家居、消费电子等
只需要掌握某种嵌入式处理器和单片机相关知识
和编程技巧,门槛较低、容易被取代,未来发展受限
1理解操作系统:从裸机、状态机、控制反转的演化理解操作系统移植过程;
2计算机组成原理:使用自己设计的汇编指令,动手做一台8位的计算机;
3C语言编程:掌握高性能编程语言,夯实基本功;
4硬件基本原理:根据产品要求亲手设计硬件原理图并生产打样焊接;
5数据结构:理解各类常见的数据结构以及操作。
硬件基础
电学基础电路基础数电模电常用的电子元器件元器件参数和选型原理图datasheet集成电路PCB设计生产打样焊接调试等
计算机组成原理
数字电路原理数据表示数据运算寄存器与数据存储指令集和指令系统总线系统中央处理器ALU输入输出外设等
C语言基础
常用数据类型结构体指针函数文件操作
操作系统
进程管理内存管理文件管理外设管理等
数据结构
数组队列链表堆栈树表等
1理解MCU开发过程:从0到1理解和实践单片机开发与调试过程;
2常见外设协议开发:实践开发流水灯、氛围灯、洗脸器、电动牙刷、烘鞋器、烫发夹、usb键盘以及电子表等实战案例;
3通讯协议原理:面对纷杂的电子元件及传感,学会使用合适的通信协议开发并理解原理;
4逻辑分析工具应用:掌握快速定位以及分析总线中信号问题的能力。
8位/32位MCU开发
STC系列芯片手册及开发板原理图ISP烧录主程序启动流程
常见外设&传感开发
LED灯电位器数码管蜂鸣器震动马达温湿度传感器显示屏独立按键矩阵键盘RTC时钟等外设开发
外设协议通讯原理
GPIOPWMIICSPI控制及相关原理ADC采样/模数转换USB驱动HID设备中断开发等
逻辑分析调试工具
采样时间采样率设置,时钟频率使能信号数据帧信息详解
1STM32/GD32芯片开发:熟悉Arm指令,掌握主流平台Cortex-M系列下的开发;
2实时操作系统(RTOS):熟悉FreeRTOS移植,掌握在RTOS下开发多MCU的嵌入式程序;
3算法调试与应用:掌握PID控制算法的多种方式应用与调试;
4嵌入式图形库:掌握不同平台下LVGL图形库的移植;
5双轮平衡车实战:深入理解嵌入式开发,具有独立开发嵌入式产品的能力。
STM32/GD32芯片开发
Cortex-M内核寄存器/库函数开发时钟系统以及中断系统
实时操作系统(RTOS)
FreeRTOS系统开发、调试与移植任务队列调度计数器
算法调试与应用
MPU6050陀螺仪应用增程式PID、位置式PID和串级PID算法的应用与调试
嵌入式图形库
RGB屏幕开发、LVGL移植对象模型、事件模型样式系统、布局系统、图像渲染系统
双轮平衡车实战
姿态评估霍尔编码器电机驱动控制角动量守恒实时信息采集与显示
1全真企业项目实训:1比1还原企业真实任务流程;
2杰理蓝牙开发:使用市场占用率最高的蓝牙芯片为主控mcu;
3wifi开发:wifi station和 wifi ap开发;
4多mcu协作与通讯:掌握mcu间通讯与集成。
全真企业开发实战
讲A练B真实企业需求芯片学习使用流程
蓝牙音箱开发
工程配置工程操作代码流程模式配置编解码流程
WIFI模组与无线小电视
WIFI-AP模式WIFI-STA模式Socket通讯开发嵌入式UI开发SolidWorks结构设计
应用案例
儿童绘本故事机点读笔宠物喂食机蓝牙小音箱
1嵌入式系统上位机:掌握通讯协议的封装和多任务调度是嵌入式上位机开发非常要的技能;
2Python编程语言:理解Python语法及特性,可以快速的编写简洁的代码完成功能的开发;
3PyQt GUI库:熟练掌握Qt图形用户界面库,可以根据需求自定义上位机界面;
4面向对象与版本控制:掌握版本管理以及面向对象思想,可以提高程序的可读性与可维护性。
嵌入式系统上位机
网络通信协议封装和解析上位机多任务开发与调度远程控制与调试
Python编程语言
常见数据结构循环与列表元素与函数高级变量文件IO等
PyQt GUI库
窗口、布局与控件及自定义控件信号和槽上位机控制软件界面设计
面向对象与版本控制
面向对象三大特征与实战案例GIT版本和分支管理
1图像基本参数与变换:掌握图像处理的基本知识,为机器视觉开发夯实基础;
2图像高级变换算法:掌握高级变换技术,熟悉算法原理,可以完成更高级的需求;
3图像案例实操:通过案例实操可以掌握如何去组合应用图像处理技术;
4机器学习与深度学习:理解机器学习与深度学习的理论基础和算法;
5智能机器视觉实战:掌握机器视觉人工智能模型的应用。
图像基本参数与变换
几何变换美化特效形态学变换HSV颜色模型图片二值化直方图与人脸识别等
图像高级变换算法
卷积运算滤波与算子霍夫变换边缘与轮廓图片归一化与模版匹配等
图像案例实操
实时车道线识别背景消除等
机器学习与深度学习
线性回归梯度下降分类与回归神经网络与卷积神经网络Pytorch框架YOLO框架等
智能机器视觉实战
基于机器视觉的人工智能模型构建训练部署与预测应用
1Linux驱动开发:熟悉Linux内核、设备树及文件系统,能够对系统引脚进行复用开发;
2ROS架构与开发:理解ROS架构和开发模式,可以快速在RK3566/3568开发板上开发ROS程序;
3ROS通讯机制:熟悉ROS通讯模型,可以快速实现多节点间的通讯调度;
4综合项目实战:掌握软硬结合的ROS开发,对数据融合以及远程部署等开发技能有很大的提升。
Linux驱动开发
UBOOTLinux内核设备树根文件系统Linux系统引脚复用GPIO子系统pwm子系统Linux串口通讯
ROS架构与开发
Master与Node单节点与多节点模式文件系统与工程结构瑞芯RK3566/3568开发板
ROS通讯机制
Topic、Service通讯消息模型以及自定义消息可视化日志系统等
综合项目实战
巡线智能车多传感数据融合机器视觉与深度学习模型训练、部署本地开发&远程部署

由底层原理到上层应用从CPU设计、微处理系统设计与应用、编
程语言,结合机器人操作系统、鸿蒙操作
系统实践机器视觉、深度学习和目标检测
的智能化硬件的项目实战
实战项目 贯穿全程智能小车、平衡车、智能TV、仿生多足
机器人、嵌入式实时操作系统、虚拟机
等实战贯穿,学习场景即工作场景
专业毕设 谈薪利器面试带作品,offer轻松拿:冲牙器、电动牙
刷、智能车、智能穿戴设备等。几十个项目
方案,学完后可自主选择求职作品
模仿猫、狗、蜘蛛等动物运动方式设计的机器人,多足机器人具有较高的稳定性和耐久性,可以在复杂的环境中行走,具有广泛的应用场景。
机械设计: SolidWorks结构设计,机器人的腿应该具有足够的力量和伸缩性,以便在不同的地形上行走。
运动控制:通过步态算法控制机器人的各个腿在不同的地形上运动。
传感器和感知:通过传感器来感知它周围的环境,如超声波雷达、视觉传感器等。这些传感器可以帮助机器人感知它周围的障碍物、地形等信息,从而更好地控制运动。
软件设计:包括程序设计和控制算法设计。程序设计包括对机器人的各个部件进行编程,以实现所需的功能。控制算法设计包括设计用于控制机器人运动的算法。
平衡小车是一种自平衡的机器人,使用传感器来测量它的姿态,并通过电机控制它的轮子来保持平衡。
传感器:使用陀螺仪、加速度计来测量小车的姿态。获取小车角度、速度和加速度的信息。
控制系统:使用一个控制系统和PID算法根据传感器数据调整电机的转速,以保持平衡。
电机:平衡小车使用两个电机来控制它的轮子。通过控制器调整转速,以调整小车的速度和方向。
电池:可充电锂电池提供电力。
外壳设计:使用外壳来保护内部组件,并使平衡车更容易操作。外壳可扩展特殊功能,摄像头、传感器或触摸屏。
网络连接:通过网络连接来与平衡小车进行通信。
音箱将融合蓝牙和Wi-Fi连接技术,可蓝牙和wifi控制,便携,小巧,音箱带具备触摸功能的LCD屏幕,可触摸交互操作。音质清晰,兼容性强。
主控MCU:采用杰理AC79系列MCU,这个选择为音箱提供了高性能和灵活性,使其能够有效地处理音频处理和控制任务。
WI-FI和通信:集成了Wi-Fi模块以实现高速、可靠的网络连接。通过TCP和UDP通信协议,音箱可以与互联网连接,并与其他设备进行数据交互。
蓝牙控制:音箱具备蓝牙连接功能,用户可以使用蓝牙将其与智能手机、平板电脑或其他蓝牙设备配对,以便播放音乐、接听电话或进行其他蓝牙相关操作。
SPI触摸屏控制:配备了带有触摸功能的LCD屏幕,通过SPI(串行外设接口)控制该触摸屏,用户可以通过触摸屏进行直观的音箱操作,如切换歌曲、调整音量、查看歌曲信息等。
一款多功能智能腕表,满足用户的健康监测和日常需求。该手表内置各种传感器,能够监测用户的心率、步数、睡眠质量等健康数据。它还支持蓝牙连接,与智能手机互联,提供通知和控制功能。
主控MCU:采用杰理ac79MCU,为手表提供足够的计算能力和节能功能,以支持多种传感器数据处理和通信任务。
网络通信模块:集成了Wi-Fi模块,通过TCP和UDP通信协议实现了高速的无线网络连接。这使得手表能够实时传输数据到云端或与其他设备进行通信,以支持各种云服务和智能手机应用。
蓝牙控制:支持蓝牙连接,与智能手机互联,以实现通知推送、远程控制和数据同步。
传感器数据:内置多种传感器,包括心率传感器、加速度计和陀螺仪等。这些传感器能够实时监测用户的健康数据和运动活动,并将数据传输到MCU进行分析和处理。
运动计步算法:陀螺仪数据和其他传感器数据来实现精确的计步算法,以跟踪用户的步数和活动。这有助于提供准确的健康和运动数据。
基于机器视觉感知,使机械手能够自动感知和理解其周围环境,然后根据这些视觉信息自动联动执行各种任务。这项技术可应用于制造业、仓储与物流、医疗、农业等多个领域,以提高生产效率和自动化水平。
机器视觉:使用OpenCV库进行机器视觉感知任务,可用于图像处理、特征检测、物体跟踪等任务。
机器学习与深度学习:通过机器学习和深度学习技术来训练视觉识别模型,模型用于识别和分类图像中的物体、识别人脸、进行手势识别等。
PyTorch、YOLO框架:使用PyTorch作为深度学习框架,YOLO(You Only Look Once)作为目标检测框架。YOLO可以实时检测图像中的物体,适用于实时应用,如机器手的物体抓取和识别。
机械手臂运动控制:通过运动学逆解、关节角度控制等开发运动控制任务,使机械手能够根据视觉信息自动调整其姿态和位置。
人工智能物体识别算法:使用深度学习和计算机视觉的融合实现物体识别算法识别和操作各种不同形状和尺寸的物体。
无人机项目配备了多种传感器和自主飞行技术结合飞行控制算法和通信技术使其适用于多种应用领域,如航拍、农业、救援等。
传感器集成:传感器包括陀螺仪、加速度计、GPS、相机等。这些传感器用于感知无人机的位置、方向、环境条件和拍摄图像或视频。
PID和飞行控制算法:通过PID(比例-积分-微分)控制算法来分析传感器数据,调整电机和舵机的输出,以保持无人机的平衡和稳定性。
无线蓝牙通讯控制:通过蓝牙通信技术遥控器或上位机进行通信和控制。这允许远程操控无人机的飞行,包括起飞、降落、悬停、航点导航等功能。
上位机编程:上位机软件提供自定义飞行任务和轨迹。这些任务可以根据需要自动执行,例如进行地图绘制、农田巡视或搜索救援操作。
陀螺仪传感器应用:用于测量和监测无人机的旋转和方向变化。这些数据在飞行控制中起着关键作用,帮助无人机保持平稳的飞行路径。







中国开放原子开源基金会银牌讲师,广东省人力资源与社会保障厅师资培训基地人工智能、区块链技术专家讲师。
广东省职业教育“双师型”名师工作室成员,厦门大学大数据实验室百家讲坛特邀讲师。
多本畅销软件开发教材的编写人和审稿人,国家十三五教材审稿人,在教学方面有丰富的经验。
中国开放原子开源基金会银牌讲师,擅长物联网协议、物联网设备的软硬件开发部署。
精于通过编写优质C、C++代码,实现芯片功能。
对智能硬件设计开发、机器人运动控制、传感器数据处理、人工智能算法有深入的理解和丰富的经验。
传智教育高级讲师,拥有多年智能机器人、物联网行业经验。
精通C++、C、Python、Java等多种编程语言,精通ROS机器人操作系统,对机器人开发有深入研究。
开放原子开源基金会银牌讲师,毕业于深圳大学,10年的软件开发,机器学习和人工智能算法研发经验,。
精通C/C++, Python等开发语言, 对智能机器人以及Pytorch有丰富的项目授课经验,对项目全流程开发有丰富的架构经验,对算法工程实践有深入的研究。
授课风格风趣幽默, 知识讲解结构层次分明。
传智教育高级讲师,鸿蒙开发先行者。
精通C、C++、Python、Java等多种编程语言,熟悉电子电路设计,拥有多年物联网行业经验,精通ROS机器人操作系统,对机器人开发有一定见解。
教学方面能够激发学生的学习兴趣,帮助他们发掘自己的潜能,能够为学生提供专业的技术指导,帮助他们解决实际开发中遇到的问题。
高级讲师,资深开发工程师,10多年研发经验和教学经验。
精通C/C++/Python语言编程,对GTK+、Qt图形界面编程有深入研究。
精通嵌入式、物联网开发,熟练自动化测试,讲课幽默生动有趣,深入浅出。

开放原子基金会银牌导师开放原子开源基金会
开源大使和银牌讲师 6人
英伟达黑客松优胜奖团队获得人工智能嵌入式模型
黑客马拉松竞赛/加速推理优胜奖

嵌入式系统设计师教学团队软件设计师 5人
嵌入式系统设计师 3人

深圳市技术能手深圳集成电路开发技术能手3人
鸿蒙开发开源社区领袖1人

花500升级电动自行车
黑马无人车
3天制作巡线智能车

黑马研发的咖啡机器人
从入学到就业,你只负责学习,其他事情放心交给我们






AI教辅,学习成果可视化
学员专属档案建立档案,目标导向式学习
入学多维测评技术摸底,面谈技术导师
终身职业规划学习计划和就业规划,私人定制
班主任全程督学跟踪服务,克服惰性
讲师互动面授边学边练,答疑互动纠错
作业实战布置综合案例,练习实践
学习测评阶段效果测评,查漏补缺
社群联结小伙伴一起学,集结未来大厂人脉
精讲面试题专业指导,技术面试题讲解
1V1模拟面试面对面讲解,给出就业建议
试用期辅导答疑、辅导,平稳渡过试用期
持续职场发展免费享,更新项目和学习资料










